 智能制造網APP
智能制造網APP
 智能制造網手機站
智能制造網手機站
 智能制造網小程序
智能制造網小程序
 智能制造網官微
智能制造網官微
 智能制造網服務號
智能制造網服務號










 直播推薦
直播推薦
 回放
回放
 回放
回放
01 引言
自動駕駛車輛行駛過程中,多傳感器(相機、激光雷達等)采集的帶有精準同步時間戳的數據,是車輛實現高精度感知、定位、決策與規劃的核心前提。正因如此,在自動駕駛數據采集系統中,傳感器與主控單元之間通常會采用(g) PTP 協議,以保障多傳感器的硬件時間同步。
然而和客戶對接過程中,客戶普遍反饋在實際開發過程中,要實現單個或多個傳感器與主控平臺的精準時間同步,往往會面臨時間同步精度不足、多傳感器時間戳不統一、系統部署流程復雜、數據質量難以管控等一系列問題。
康謀長期致力于多傳感器數據采集方案開發,在解決客戶問題的實踐中,積累了應對上述時間同步問題的豐富經驗。本文針對 PTP 時間同步協議在傳感器與主控平臺間的應用,分享相關的實踐案例與技術經驗,和大家一起討論學習。
02 相機與工控機時間同步
PTP時間同步體系
以相機和工控機實現PTP時間同步部署為例,相機采集端口采集用以太網接口(支持PTP),工控機對應采用以太網接口(支持PTP),以此搭建基礎的同步硬件鏈路。此外,激光雷達通常采用車載以太網(支持 (g) PTP 協議)完成時間同步,其實現思路與部署邏輯和本案例中的相機方案同理。

PTP時間同步可以簡單劃分為四層結構:
①硬件層:依托網卡 PHC(Precision Hardware Clock)硬件時鐘,在數據包收發的物理層 / 數據鏈路層邊界直接打上時間戳。可規避軟件協議棧的延遲干擾,為整個同步體系提供納秒級的硬件時間基準。
②協議層:基于 IEEE 1588 PTP 協議,通過 Sync/Follow-Up 和 Delay_Req/Delay_Resp 兩組核心消息對實現主從同步。Sync/Follow-Up 消息傳遞主時鐘精確時間,Delay_Req/Delay_Resp 消息測量鏈路往返延遲,最終計算主從時鐘偏移量并完成從時鐘校正。
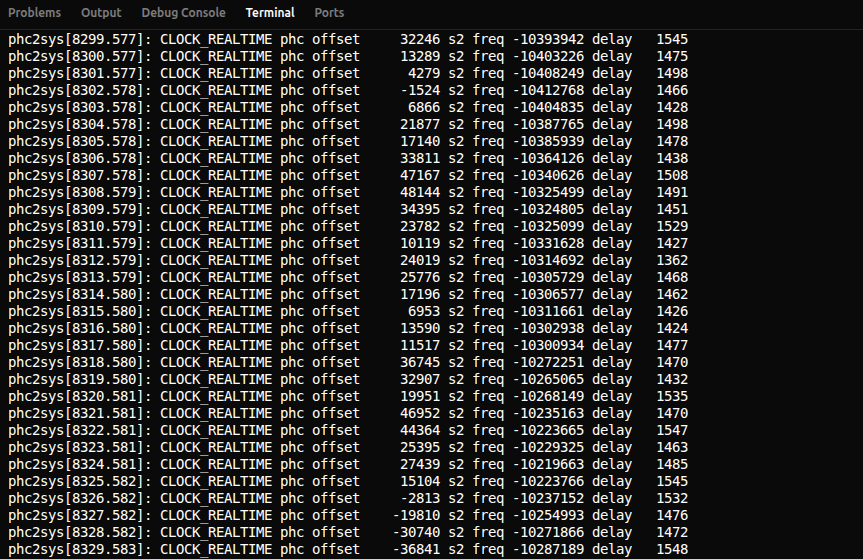
③系統層:采用phc2sys工具,將 PHC 硬件時鐘時間同步至 Linux 系統時鐘(CLOCK_REALTIME),確保系統時間與硬件時間的一致性,保障同步穩定性。
④應用層:從圖像緩沖區的 Chunk 數據中提取 PTP 硬件時間戳,時間戳以 int64_t 格式存儲,保持納秒級精度,并直接關聯到每一幀圖像數據。

多網口同步架構
在多相機場景中,每個網口需要運行一個獨立的ptp4l實例。如果配置不當,多個實例會產生沖突,就像多個“Master”各自發布不同的時間標準。
針對這一問題,采用系統時鐘中轉同步架構,以Linux 系統時鐘為統一基準,借助phc2sys工具實現多網口 PHC(Precision Hardware Clock)的層級化同步,解決多實例沖突問題。

在實現過程中,將所有PHC都通過phc2sys同步到系統時鐘,確保時間基準統一。每個網口的 ptp4l 實例仍基于自身綁定的 PHC獨立工作,負責對下游相機進行時間同步,由于各 PHC 已校準至同一系統時鐘,多 ptp4l 實例的時間基準保持高度一致,從根源上消除沖突。此外,phc2sys 工具啟用-w參數,自動獲取 UTC 時間偏移量,無需手動配置,有效避免人工參數設置帶來的同步偏差。

PTP狀態監控
實現了完整的PTP狀態監控機制,實時跟蹤同步過程:

①狀態轉換流程:Initializing → Uncalibrated → Listening → Slave;
②狀態監控頻率:每10秒檢查一次狀態,提供實時反饋;
③同步等待機制:可配置的同步超時時間(默認120秒),給相機足夠的時間完成同步;
④診斷信息輸出:實時顯示PTP時鐘精度、父時鐘ID、同步計數器等診斷信息。
可視化驗證
為了進一步呈現硬件時間同步效果,在測試過程中,我們將每幀時間戳疊加在該張圖像上。采用多網口同步架構后,兩個相機啟動后,均能實現PTP硬件時間同步。隨著時間增加Frame計數也會累加,可以看出,在累計1.2W+幀后,可以觀察到PTP時間同步依舊穩定。

此外,影響時間同步精度另一個指標就是時間偏移量,即系統時鐘(CLOCK_REALTIME)與 PHC 硬件時鐘時間差。經過實踐開發,可以看到offset(單位:ns)最值約為 48147 ns(≈48 μs),最小值約為 - 36840 ns(≈-37 μs),整體波動范圍約為 85 μs(48 μs - (-37 μs)),偏移量的值未超過 50 μs。一般系統時鐘與 PHC 的偏移控制在百微秒內即滿足多傳感器同步需求,因此時間偏移量滿足需求。
03 結語
這套基于PTP協議的自動駕駛多傳感器時間同步方案,在實施過程中,依托多網口 PHC 時鐘中轉同步架構、phc2sys 工具校準、實時 PTP 狀態監控及異常處理機制,實現了微秒級時間同步精度。
此外,通過 YAML 參數化配置、自動化部署腳本與完整文檔體系,降低了技術門檻與部署難度,支持從單相機到多相機部署、對激光雷達等設備靈活擴展能力。
實踐證明,該套方案能有效解決傳統方案中,客戶所面臨的時間同步精度不足、多傳感器時間戳不一致、系統部署復雜、數據質量不可控等核心痛點。此外,更可保障系統數小時連續穩定運行,提升數據采集效率與質量。
全年征稿/資訊合作
聯系郵箱:1271141964@qq.com
免責聲明
- 凡本網注明"來源:智能制造網"的所有作品,版權均屬于智能制造網,轉載請必須注明智能制造網,http://www.zgjming.com。違反者本網將追究相關法律責任。
- 企業發布的公司新聞、技術文章、資料下載等內容,如涉及侵權、違規遭投訴的,一律由發布企業自行承擔責任,本網有權刪除內容并追溯責任。
- 本網轉載并注明自其它來源的作品,目的在于傳遞更多信息,并不代表本網贊同其觀點或證實其內容的真實性,不承擔此類作品侵權行為的直接責任及連帶責任。其他媒體、網站或個人從本網轉載時,必須保留本網注明的作品來源,并自負版權等法律責任。
- 如涉及作品內容、版權等問題,請在作品發表之日起一周內與本網聯系,否則視為放棄相關權利。









 浙公網安備 33010602000006號
浙公網安備 33010602000006號
 智能制造網APP
智能制造網APP
 智能制造網小程序
智能制造網小程序
 微信公眾號
微信公眾號




2026第二屆激光制造與增材制造創新發展大會暨展覽會
展會城市:北京市展會時間:2026-09-21